Featured Projects
Jack in a Cup Impact Simulation
Simulation of Impact Conditions when Jack is being thrown around a shaking cup, utilizing Euler Lagrage Equations, the Impact Equations, and python.
GitHub
Ball Catching Franka Arm with YOLO
Real-time ball detection using YOLO and stereo vision combined with least squares analysis trajectory prediction and the MoveIt2 libray for franka arm control.
GitHub
OpenCV Pen Stealing Robot Arm
Watch out! Utilizing OpenCV, this robot can see purple pens, identify their location, and will reach out to steal them. Keep your pens close!
GitHubMore Projects
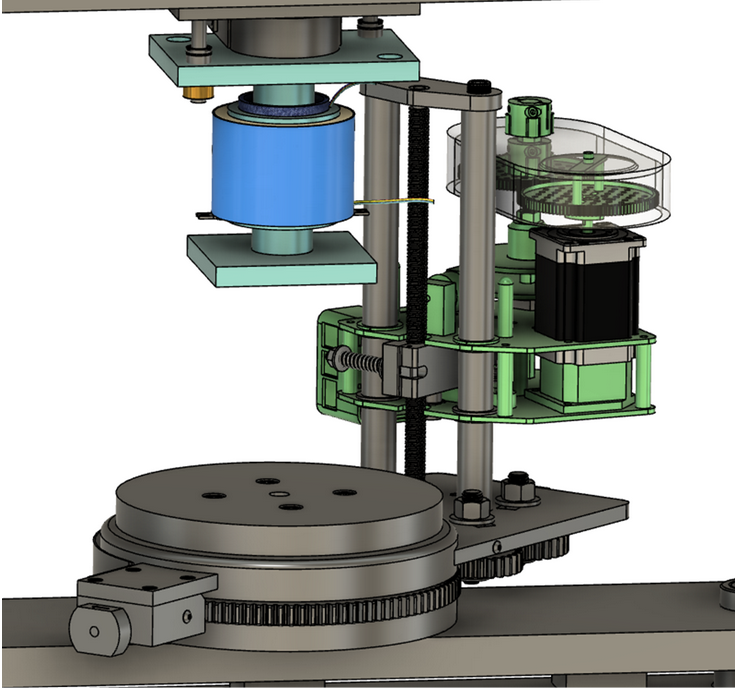
Wrapping Tension Control
Designed, programed, and implemented a device which can measure and control tension of fiberglass tape during Sandia Laboratories’ thermal battery wrapping procedure.
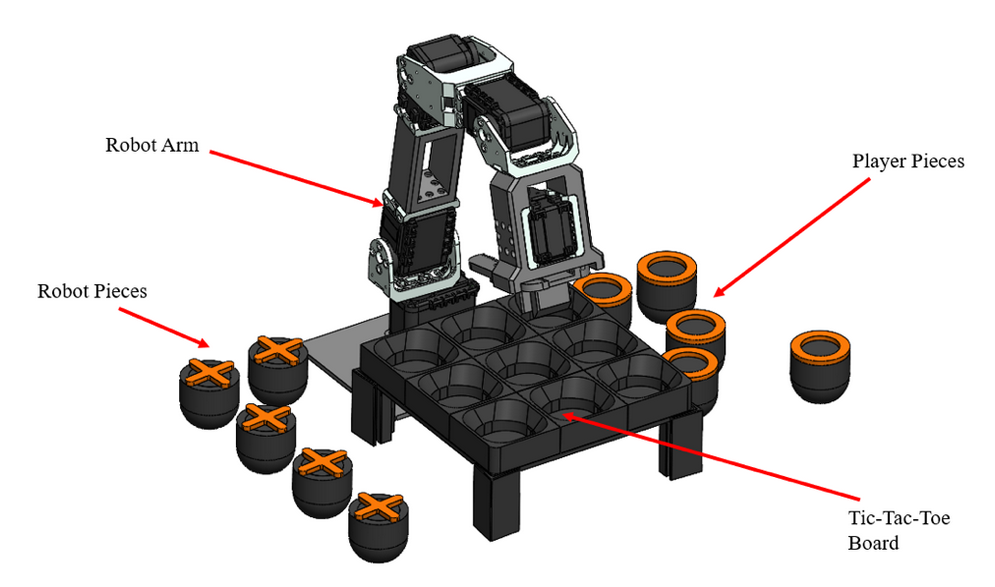
Tic Tac Toe playing robot arm
Robot arm which never loses tic tac toe, utilzing inverse kinematics and predetermined positions for game play and the minimax algorithm for decision making